












Profondeur de champ et profondeur de foyer
Auteurs : Gregory Hollows, Nicholas James
Cette note correspond à la Section 3.4 du Guide de Ressources en Imagerie.
En raison de la similitude de leur nom et de leur nature, la profondeur de champ (DOF) et la profondeur de foyer sont des concepts souvent confondus. Pour simplifier les définitions, la DOF concerne la qualité d'image d'un objectif fixe lorsqu'un objet est repositionné, tandis que la profondeur de foyer concerne un objet fixe et la capacité d'un capteur à maintenir la mise au point pour différentes positions du capteur, y compris l'inclinaison.
Profondeur de champ
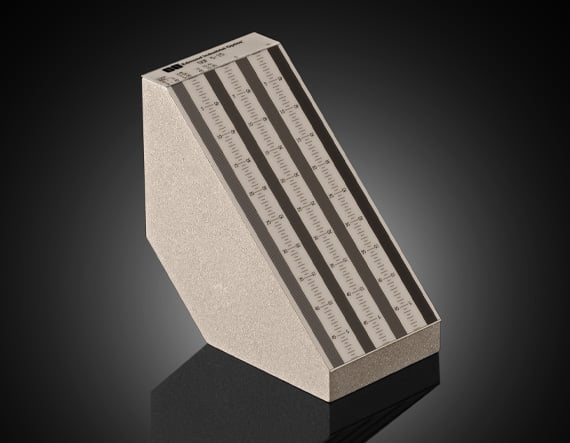
La DOF d'un objectif est sa capacité à maintenir une qualité d'image souhaitée (fréquence spatiale à un contraste spécifié), sans refocalisation, si la position de l'objet est rapprochée et éloignée du plan de mise au point optimale. La DOF s'applique également aux objets présentant des géométries complexes ou des caractéristiques de hauteur différente. Lorsqu'un objet est placé plus près ou plus loin de la distance de mise au point d'un objectif, l'objet se brouille et la résolution et le contraste en souffrent. Ainsi, la DOF n'a de sens que s'il est défini avec une résolution et un contraste associés. Plusieurs mires peuvent être utilisées pour mesurer directement et évaluer la DOF d'un système d'imagerie. Ces mires sont détaillées dans la section Aperçu des mires de test.
Résolution et DOF
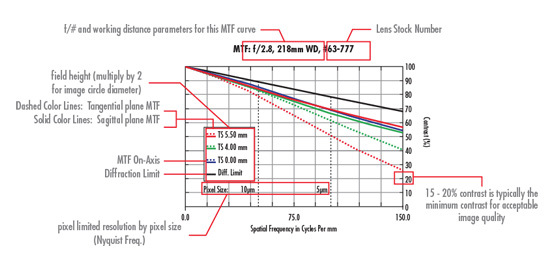
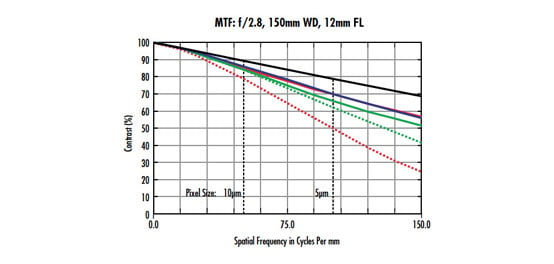
« Cet objectif a-t-il une bonne DOF ? » Il est difficile de la quantifier sans spécifier la taille des détails de l'objet ou la fréquence de l'espace de l'image. Plus le détail est petit, plus la fréquence spatiale nécessaire est élevée, et plus la DOF que l'objectif peut produire est petite. Une courbe DOF peut être utilisée pour voir comment un objectif se comporte sur une profondeur donnée à la taille d'un détail spécifique (Courbes de performance des objectifs). Ces graphiques ne tiennent pas seulement compte des limitations théoriques associées au réglage du f/#, mais aussi des effets d'aberration de la conception de l'objectif.
Dans la Figure 1, les valeurs de contraste (axe des y) sont observées sur une plage de distances de travail (WD) (axe des x) à une fréquence fixe de 20$ \small{\tfrac{\text{lp}}{\text{mm}}} $ (détail de l'image). Notez la différence de DOF entre la Figure 1a, qui est réglée à f/2,8, et la Figure 1b, qui est réglée à f/4. Notez également qu'il y a plus de DOF utilisable au-delà du meilleur foyer qu'entre le meilleur foyer et l'objectif, en raison de la diminution du grossissement. Les graphiques eux-mêmes contiennent des lignes de couleurs différentes qui indiquent les différentes positions des capteurs. Ces types de courbes DOF asymétriques sont courants dans les objectifs à distance focale fixe.

Figure 1 : Courbes DOF pour un objectif à f/2,8 (a) et f/4 (b).
La Figure 2 présente le même objectif que celui de la Figure 1a mais à une distance de travail différente. Notez qu'une augmentation des DOF se produit pour des distances de travail plus longues. Finalement, lorsque l'objectif fait la mise au point sur des objets infiniment éloignés, la condition hyperfocale apparaît. Cette condition est atteinte à la distance dans laquelle tout apparaît dans une mise au point égale.

Figure 2 : Courbes DOF pour un objectif à f/2,8 à 200 mm de WD (a) et à 500 nm WD (b). La note (a) a une échelle beaucoup plus grande.
Comment f/# affecte la DOF
La modification du f/# d'un objectif modifie la DOF, comme le montre la Figure 3. Pour chaque configuration présentée dans la Figure 3, il existe deux faisceaux de rayons. Le faisceau représenté par les lignes noires en pointillé montre la qualité de la mise au point de l'objectif. Lorsqu'un objet s'éloigne de la meilleure position de mise au point (là où les lignes en pointillés se croisent), les détails de l'objet se déplacent dans une zone plus large du cône. Plus le cône est large, plus l'image s'estompe dans l'environnement. Le f/# de l'objectif contrôle la vitesse d'expansion du cône et la quantité d'informations ou de détails flous à une distance donnée. La Figure 3a montre un objectif avec une DOF peu profonde, tandis que la Figure 3b montre un objectif avec une DOF importante.

Figure 3 : Représentation géométrique de la DOF pour les objectifs à f/# élevé et faible.
Le cône rouge de la Figure 3 est une représentation angulaire de la résolution du système. L'intersection des lignes du cône rouge et du cône noir pointillé définit la portée totale de la DOF. Plus le f/# est faible, plus les lignes noires en pointillés s'étendent rapidement, et plus la DOF est faible.
Plus les détails sont petits (représentés par un cône rouge plus petit), plus les faisceaux des Figures 3a et 3b se rapprochent. En fin de compte, si l'on augmente trop le f/#, les petits détails deviennent flous car on atteint la limite de diffraction de l'objectif, puisque la résolution limite de l'objectif est inversement proportionnelle au f/#. Cette limitation signifie que si l'augmentation du f/# augmente toujours la DOF, la taille minimale de l'élément résoluble (même à la meilleure mise au point) augmente. Pour plus d'informations sur la limite de diffraction et sa relation avec le f/#, voir La tache d'Airy et la limite de diffraction. L'utilisation de courtes longueurs d'onde permet de récupérer une partie de cette résolution. Pour en savoir plus sur la façon dont la longueur d'onde affecte les performances du système, consultez Courbes FTM et performances des objectifs. Notez que cet effet de diffraction n'est pas visible sur la Figure 3, mais qu'il est mentionné ici comme un élément à prendre en compte.
En général, lorsque les objectifs sont mis au point à des distances de travail courtes, les grands angles de cône font que les cônes divergent très rapidement de part et d'autre de la meilleure mise au point, ce qui entraîne une DOF limitée. Pour les objets mis au point à des distances de travail plus longues, le taux de transition des faisceaux diminue et la DOF augmente.
Ex : f/# Effets gros plan au niveau de l'objet
La Figure 4a illustre le faisceau de rayons au centre d'un objet inspecté à f/2,8 (a) et f/8 (b). Les lignes verticales représentent des incréments de 2 mm par rapport à la meilleure mise au point. Sur chaque ligne verticale, un carré représente la taille de la caractéristique discrète d'un seul pixel de détail. La Figure 4a montre que plus la largeur du faisceau de rayons s'étend, plus le nombre de rayons manquant le détail est important. Dans la Figure 4b, le faisceau se dilate plus lentement et les rayons frappent tous le détail qui est plus grand que le diamètre du faisceau pour toutes les profondeurs indiquées.

Figure 4 : Illustration du faisceau de rayons au centre d'un objet inspecté à f/2,8 (a) et f/8 (b).
La Figure 5 illustre le même concept que la Figure 4, mais les cônes représentent plusieurs points du champ visuel. Chaque détail et l'espace suivant représentent une paire de lignes. Le chevauchement des faisceaux de la Figure 5a montre comment les informations se mélangent plus rapidement que celles de la Figure 4b et montre comment deux détails d'objets différents peuvent se confondre en raison d'un f/# plus faible. Dans la Figure 5b, cela ne se produit pas en raison du f/# plus élevé de l'objectif.

Figure 5 : Illustration des faisceaux de rayons à travers une partie du centre du FOV à f/2,8 (a) et f/8 (b).
Profondeur de foyer - AVANCÉ
La profondeur de foyer est le complément de la profondeur de champ dans l'espace image. Elle est liée à la façon dont la qualité de la mise au point change du côté du capteur de l'objectif lorsque celui-ci est déplacé, alors que l'objet reste dans la même position. La profondeur de foyer caractérise la quantité d'inclinaison et de basculement tolérée entre le plan de l'image de l'objectif et le plan du capteur lui-même. Lorsque le f/# diminue, la profondeur de foyer diminue également, ce qui augmente l'impact de l'inclinaison sur l'obtention de la meilleure mise au point sur le capteur. Sans alignement actif, il y aura toujours un certain degré de variation dans l'orthogonalité entre le capteur et l'objectif utilisé ; la Figure 6 montre comment ce problème se pose. On pense généralement que les problèmes de profondeur de foyer ne se posent qu'avec les grands capteurs.
Toutefois, ce problème est indépendant de la taille du capteur. Comme le montre la dérivation de l'équation 3, la profondeur de foyer, $\delta $, dépend fortement du nombre de pixels, $ p $, et a peu à voir avec la taille de la matrice ou de pixels, $ s $. Plus le nombre de pixels des capteurs augmente, plus ce problème est évident. En particulier, dans de nombreuses applications de balayage linéaire, les grandes matrices et les faibles f/# soulignent la nécessité d'un alignement minutieux entre l'objet, l'objectif et le capteur.
\frac{\delta}{2} & > z \\
\left( f / \# \right)_w & > \frac{1}{2} \left( p \times \tan{\alpha} \right)
\end{align}
\frac{\delta}{2} & > z \\
\left( f / \# \right)_w & > \frac{1}{2} \left( p \times \tan{\alpha} \right)
\end{align}

Figure 6 : Comment l'inclinaison du capteur, par rapport à l'axe optique, affecte la profondeur de foyer, au niveau du pixel (a) et du capteur (b).
Effets de l'inclinaison du capteur
La Figure 7 montre un objectif de 35 mm utilisant un éclairage de 470 nm. La Figure 7a est réglée sur f/2,8 et la Figure 7b sur f/5,6. Les deux graphiques vont jusqu'à 150$ \small{\tfrac{\text{lp}}{\text{mm}}} $ - la limite de Nyquist d'un capteur avec des pixels de 3,45 µm. Il est facile de voir que les performances de la figure 7a sont bien meilleures que celles de la Figure 7b. L'utilisation de cet objectif à un réglage de f/2,8 offre le plus haut niveau de qualité d'image dans un plan objet donné. Cependant, comme nous l'avons vu dans la section précédente, l'inclinaison du capteur aura un impact négatif sur la qualité de l'image produite, et plus le nombre de pixels est élevé, plus l'effet est prononcé.

Figure 7 : Courbes de performance FTM pour un objectif de 35 mm à f/2,8 (a) et f/5,6 (b). Il est à noter que les deux conceptions fonctionnent presque à la limite de la diffraction.
La Figure 8 analyse la profondeur de foyer pour les deux cas de la Figure 7. Dans les deux cas, la ligne verticale la plus à droite est au meilleur foyer pour l'ensemble de l'image. Chaque ligne semi-verticale à gauche de la meilleure mise au point représente une position 12,5 µm plus proche de l'arrière de l’objectif. Ceux-ci simulent les positions des pixels, en supposant une inclinaison de 12,5 µm et 25 µm respectivement du centre au coin du capteur. Le faisceau de rayons bleus montre le centre de l'image, et les faisceaux de rayons jaunes et rouges montrent les coins de l'image. Les faisceaux jaunes et rouges représentent un cycle de paires de lignes sur le capteur en supposant des pixels de 3,45 µm. Remarquez sur la Figure 8a, que pour f/2,8, il y a déjà un chevauchement entre les faisceaux de rayons jaunes et rouges lors du passage à la position d'inclinaison de 12,5 µm. En passant à 25 µm, le faisceau rouge couvre maintenant deux pixels complets et environ la moitié du faisceau jaune également. Cela provoque un flou important. Dans la Figure 8b, pour f/5,6, les faisceaux de rayons jaunes et rouges restent dans un pixel sur toute la plage d'inclinaison de 25 µm. Notez que la position du pixel bleu ne change pas, car la pointe/l'inclinaison est centrée sur ce pixel.

Figure 8 : Faisceaux de rayons du même objectif de 35 mm de distance focale à f/2,8 (a) et f/5,6 (b) dans l'espace image. Le faisceau de rayons bleus se trouve au centre de l'image ; les faisceaux rouges et jaunes se trouvent dans les coins de l'image.
La Figure 9 montre le changement de performance de la FTM au coin de l'image pour cet objectif de 35 mm en supposant une inclinaison de 25 µm, vue à la Figure 8. La Figure 9a montre les nouvelles performances de l'objectif à f/2,8 ; notez la diminution des performances par rapport à la Figure 9a. La Figure 9b montre le changement de performance à f/5,6, qui est mineur par rapport à 9a. Plus important encore, l'objectif à f/5,6 sera désormais plus performant que celui à f/2,8. L'inconvénient de faire fonctionner les systèmes à f/5,6 est qu'il y a trois fois moins de lumière par rapport à f/2,8, ce qui peut être problématique dans les applications à grande vitesse ou à balayage linéaire. Enfin, si le capteur est incliné par rapport à son centre, la performance diminue à la fois en haut et en bas du capteur (et aux points correspondants du FOV), puisque les faisceaux de rayons s'étendent après la meilleure mise au point. Il n'existe pas deux combinaisons de caméra et d'objectif identiques. Lors de la construction de systèmes multiples, ce fait peut se manifester à différents degrés de grandeur.

Figure 9 : Performances MTF d'un objectif 35 mm à f/2,8 (a) et f/5,6 (b), et avec 25 μm de décalage de l'axe z causé par l'inclinaison du plan image.
Pour surmonter ces problèmes, il faut utiliser des caméras et des objectifs aux tolérances plus serrées. Pour les capteurs, certains objectifs sont dotés de mécanismes de contrôle de l'inclinaison et du basculement pour surmonter ce facteur. Notez que certains capteurs linéaires peuvent présenter des creux, c'est-à-dire qu'ils ne sont pas totalement plats ; ce phénomène ne peut pas être atténué ou supprimé par le contrôle de l'inclinaison.












ou consulter les numéros d’autres pays
facile à utiliser
entrer les numéros de stock pour commencer
Copyright 2023 | Edmund Optics, Ltd Unit 1, Opus Avenue, Nether Poppleton, York, YO26 6BL, UK
POLITIQUE DE CONFIDENTIALITÉ | POLITIQUE DE COOKIES | CONDITIONS GÉNÈRALES | CONDITIONS GÉNÈRALES B2C | MENTIONS LÉGALES | ACCESSIBILITÉ
L'entreprise Edmund Optics GmbH en Allemagne agit comme un mandataire d'Edmund Optics BV aux Pays-Bas.
Le titulaire du contrat est Edmund Optics BV aux Pays-Bas.
Ce contenu peut comporter des éléments générés ou modifiés à l'aide de l'intelligence artificielle (IA).
The FUTURE Depends On Optics®