












Caméras
Interfaces des caméras numériques
Cette note correspond à la Section 10.1 du Guide de Ressources en Imagerie.
À mesure que la technologie de l'imagerie progresse, les types de caméras et leurs interfaces évoluent continuellement pour répondre aux besoins d'une multitude d'applications. Pour les applications de vision industrielle dans les secteurs des semi-conducteurs, de l'électronique, des biotechnologies, de l'assemblage et de la fabrication, où l'inspection et l'analyse sont essentielles, l'utilisation du meilleur système de caméra pour la tâche à accomplir est essentielle pour obtenir la meilleure qualité d'image. Comprendre les paramètres des caméras, tels que les interfaces numériques, l'alimentation et les logiciels, ouvre la voie pour passer du statut de novice à celui d'expert en imagerie.
Les caméras numériques sont disponibles avec une variété d'options d'interface qui dépendent souvent des exigences d'une application. Certains formats, tels que les versions USB, peuvent simplifier considérablement le processus de configuration en fournissant une sortie vidéo et une alimentation via une seule interface. D'autres formats peuvent nécessiter une alimentation électrique supplémentaire, mais présentent des avantages tels que des taux de transfert de données plus élevés, ce qui affecte le taux d'images de la caméra, ou la prise en charge d'un plus grand nombre de dispositifs simultanés. Le tableau 1 compare les différentes interfaces des caméras numériques.
| Comparaison des interfaces numériques | ||||||
|---|---|---|---|---|---|---|
| OPTIONS DE SIGNAL NUMÉRIQUE REMARQUE : Les images ne sont pas à l'échelle |
  |
 |
|
|
 |
 |
| USB 3.1 | GigE (PoE) | 5 GigE (PoE) | 10 GigE (PoE) | CoaXPress | Camera Link® | |
| Taux de transfert de données : | 5 Gb/s | 1000 Mb/s | 5 Gb/s | 10 Gb/s | jusqu'à 12,5 Gb/s | jusqu'à 6,8 Gb/s |
| Longueur maximale du câble : | 3 m (recommandé) | 100 m | 100 m | 100 m | >100 m à 3,125 Gb/s | 10 m |
| # de dispositifs: | Jusqu’à 127 | Illimité | Illimité | Illimité | Illimité | 1 |
| Connecteur : | USB 3.1 Micro B/USB-C | RJ45 / Cat5e ou 6 | RJ45 / Cat5e ou 6 | Câblage Cat7 ou optique | RG59 / RG6 / RG11 | 26 broches |
| Tableau de capture : | En option | Non requis | Non requis | Non requis | En option | Requis |
Tableau 1 : Comparaison des interfaces des caméras numériques les plus répandues.
USB (Universal Serial Bus)
L'USB 3.1 Gen 1, anciennement connu sous le nom d'USB 3.0, est une interface populaire en raison de son omniprésence dans les ordinateurs. Il s'agit d'un système à haut débit et pratique. La vitesse maximale réalisable dépend du nombre de composants périphériques USB, le taux de transfert du bus étant fixé à 5 Gb/s. Dans USB3 Vision, les registres de contrôle de la caméra sont basés sur la norme EMVA GenICam. La norme USB3 Vision ne correspond pas à la norme informatique de rétrocompatibilité, mais certaines caméras USB 3.1 Gen 1 sont rétrocompatibles et fonctionnent à la vitesse plus lente de l'USB 2.0 (480 Mb/s). Le connecteur USB 3.1 le plus couramment utilisé dans le secteur des caméras de vision industrielle est le connecteur Micro B USB 3.1. L'USB-C (USB Type C), le type de connexion conçu pour l'avenir, fait progressivement son apparition sur le marché. Il offre des vitesses de pointe à bande unique et à double bande de 10 et 20 Gb/s respectivement. De plus, ce connecteur a un encombrement réduit et est réversible. Alors que les câbles et les caméras qui utilisent actuellement l'USB-C sont encore limités aux vitesses de transmission de données de l'USB 3.1 Gen 1, ce connecteur plus récent sera nécessaire lorsque l'industrie adoptera l'USB 3.1 Gen 2 comme interface alternative à haut débit.
GigE (Gigabit Ethernet)
GigE est basé sur le protocole internet gigabit ethernet et utilise des câbles standard Cat 5e et Cat 6 pour une interface de caméra à haut débit. Le matériel Ethernet standard, tel que les commutateurs, les concentrateurs (hubs) et les répéteurs, peut être utilisé pour plusieurs caméras, bien que la bande passante globale doive être prise en compte lorsque des connexions non peer-to-peer (directement de la caméra à la carte) sont utilisées. Dans GigE Vision, les registres de contrôle de la caméra sont basés sur la norme EMVA GenICam. En option sur certaines caméras, l'agrégation de liens (LAG) utilise plusieurs ports Ethernet en parallèle pour augmenter les taux de transfert de données. Également pris en charge par certaines caméras, le protocole PTP (Precision Time Protocol) du réseau peut être utilisé pour synchroniser les horloges de plusieurs caméras connectées sur le même réseau, ce qui permet d'établir une relation de délai fixe entre leurs expositions associées. 5 GigE et 10 GigE sont des versions plus récentes de l'interface GigE qui offrent des taux de transfert de données de 5 Gb/s et 10 Gb/s, respectivement.
CoaXPress
CoaXPress est une interface numérique haute vitesse plug-and-play destinée aux applications de vision industrielle haute résolution qui nécessitent un taux d'images élevé. Il utilise un câble coaxial et est évolutif pour plusieurs câbles ; chaque câble est capable d'atteindre 12,5 Gb/s, et chaque câble peut fournir jusqu'à 13 W de puissance à un 24V nominal. En raison de cette évolutivité, il n'y a pas de longueur de câble maximale fixée avec CoaXPress ; plus la bande passante est élevée, plus la longueur de câble maximale est faible.
Camera Link
Camera Link® est une norme d'interface série à haut débit développée explicitement pour les applications de vision industrielle. Une carte de capture Camera Link® est nécessaire pour l'utilisation, et la caméra doit être alimentée séparément. Un câblage spécial est nécessaire car, en plus des lignes de signaux de la paire différentielle à basse tension (LVDP), des canaux de communication série asynchrones séparés sont fournis afin de conserver toute la bande passante pour la transmission des données. La configuration de base à câble unique permet un transfert de 2,04 Gb/s dédié à la vidéo. Les doubles sorties (configuration complète) permettent de séparer les lignes d'envoi/réception des paramètres de la caméra pour libérer plus d'espace de transfert de données (6,8 Gb/s) dans les applications à très haut débit.
Cartes d’acquisition
Le traitement des images implique généralement l'utilisation d'ordinateurs, ce qui signifie qu'une interface numérique est nécessaire lorsqu'on utilise des caméras analogiques. Les cartes d’acquisition permettent aux utilisateurs de transmettre les signaux analogiques de la caméra à un ordinateur pour analyse. Pour les signaux analogiques (NTSC, YC, PAL, CCIR), la carte de capture contient un convertisseur analogique-numérique (CAN) qui numérise le signal pour un traitement ultérieur de l'image. Les utilisateurs peuvent ensuite capturer des images et les enregistrer pour les manipuler et les imprimer ultérieurement. Un logiciel de capture de base est inclus avec les cartes de capture, permettant aux utilisateurs d'enregistrer, d'ouvrir et de visualiser les images.
Le terme de carte d’acquisition désigne également les cartes nécessaires à l'acquisition et à l'interprétation des données provenant des interfaces des caméras numériques, mais qui ne sont pas basées sur des connecteurs informatiques standard.
Ordinateurs portables et caméras
Bien que de nombreuses interfaces de caméras numériques soient accessibles aux ordinateurs portables, il est fortement recommandé d'éviter les ordinateurs portables standard pour les applications d'imagerie à haute performance et/ou à grande vitesse. Souvent, les bus de données de l'ordinateur portable ne supportent pas les vitesses de transfert maximales et les ressources ne sont pas disponibles pour tirer pleinement parti des caméras et des logiciels hautes performances. En particulier, les cartes d'interface réseau Ethernet standard dans la plupart des ordinateurs portables ont des performances bien inférieures à celles des cartes PCIe disponibles pour les ordinateurs de bureau.
Mise sous tension de la caméra
Cette note correspond à la Section 10.2 du Guide de Ressources en Imagerie.
De nombreuses interfaces de caméra permettent d'alimenter la caméra à distance via le câble de signal (USB ou PoE, par exemple). L'alimentation par Ethernet (PoE) est une fonction disponible sur certaines caméras GigE, mais pas toutes. Lorsque ce n'est pas le cas, l'alimentation est généralement fournie soit par un connecteur Hirose (qui permet également le câblage du déclencheur et des E/S), soit par une connexion standard de type adaptateur AC/DC. Même dans les cas où la caméra peut être alimentée par une carte ou un port, l'utilisation de la connexion d'alimentation optionnelle peut être avantageuse. Vous trouverez ci-dessous trois façons différentes de connecter et d'alimenter une caméra GigE :
Connexion du câble d'alimentation des entrées/sorties à usage général (GPIO)
Connectez la caméra à un ordinateur à l'aide d'un câble GigE. Ensuite, branchez le câble d'alimentation GPIO, également appelé communément câble de connecteur Hirose, sur une prise électrique et connectez-le au port d'alimentation de la caméra. Des caméras différentes nécessiteront des câbles GPIO avec un nombre de broches différent, par exemple 6 ou 12. Pour les caméras non-PoE, un câble d'alimentation peut être la seule méthode pour alimenter la caméra.
Injecteur Power over Ethernet (PoE)
Les injecteurs PoE permettent d'alimenter une caméra via un câble GigE. Cela peut être important lorsque les restrictions d'espace ne permettent pas à la caméra d'avoir sa propre alimentation électrique, comme dans les installations en usine ou les applications à l’extérieur. Dans ce cas, l'injecteur est ajouté quelque part le long de la ligne de câbles avec des câbles standard allant vers la caméra et l'ordinateur. Cependant, certaines caméras GigE ne sont pas compatibles PoE. Branchez le câble d'alimentation de l'injecteur PoE et connectez son port "IN" à un ordinateur à l'aide d'un câble GigE. Ensuite, utilisez un autre câble GigE pour connecter le port "OUT" de l'injecteur à votre caméra.
Carte d'interface réseau Power over Ethernet (PoE NIC)
Les NIC PoE alimentent une caméra par le biais d'un ordinateur en utilisant une interface en cuivre tout en permettant à la caméra de se connecter à un réseau en fibre optique sécurisé. Les NIC PoE réduisent également le nombre de prises et de câbles nécessaires. Branchez la carte PoE dans un emplacement ouvert de la carte mère d'un ordinateur et connectez la connexion d'alimentation interne. Ensuite, utilisez un câble GigE pour connecter l'un des ports PoE de la carte et la caméra.
Logiciels pour caméras
Cette note correspond à la Section 10.3 du Guide de Ressources en Imagerie.
En général, deux choix s'offrent à vous en matière de logiciels d'imagerie : les kits de développement logiciel (SDK) spécifiques aux caméras ou les logiciels tiers. Les SDK comprennent des interfaces de programmation d'applications avec des bibliothèques de codes pour le développement de programmes définis par l'utilisateur, ainsi que des programmes simples de visualisation et d'acquisition d'images qui ne nécessitent aucun codage et offrent des fonctionnalités simples. Avec les logiciels tiers, les normes relatives aux caméras (GenICam, DCAM, USB3 Vision, GigE Vision) sont importantes pour garantir la fonctionnalité. Les logiciels tiers comprennent des logiciels tels que NI LabVIEW™, MATLAB® et OpenCV. Souvent, les logiciels tiers sont capables de faire fonctionner plusieurs caméras et de prendre en charge plusieurs interfaces, mais c'est finalement à l'utilisateur de s'assurer de leur fonctionnalité.
Capteurs
Cette note correspond à la Section 10.4 du Guide de Ressources en Imagerie.
Taille du capteur
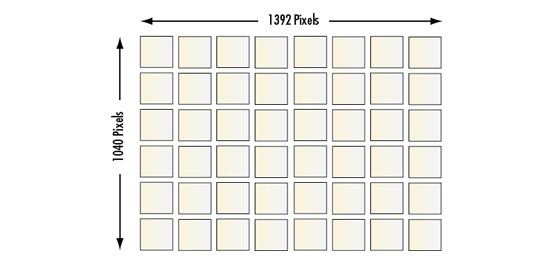
La taille de la zone active d'un capteur de caméra est importante pour déterminer le champ de vision (FOV) du système et le grossissement primaire $ \small { \left( m \right)} $. Pour un grossissement fixe, déterminé par l’objectif d’imagerie, les capteurs plus grands offrent des champs de vision plus larges. Comme le montrent la Figure 1 et le Tableau 2, il existe plusieurs tailles standard de capteurs à balayage de surface. La nomenclature de ces normes remonte aux tubes à vide Vidicon utilisés pour les imageurs de télédiffusion. Il est donc important de noter que les dimensions réelles des capteurs diffèrent. Cependant, la plupart de ces normes maintiennent un rapport d'aspect dimensionnel de 4:3 (horizontal:vertical).
Un problème qui se pose souvent dans les applications d'imagerie est la capacité d'un objectif d'imagerie à supporter certaines tailles de capteur. Si le capteur est trop grand pour la conception de l'objectif, l'image obtenue peut sembler s'estomper et se dégrader vers les bords en raison du vignettage (extinction des rayons qui traversent les bords extérieurs de l’objectif d'imagerie). Ce phénomène est parfois appelé l'effet tunnel, car les bords du champ deviennent sombres. Les capteurs de plus petite taille ne présentent pas ce problème de vignettage.
Capteurs CCD et CMOS
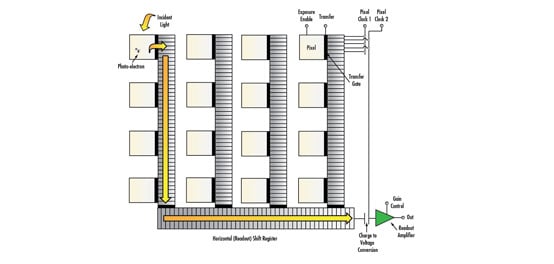
Le CCD (charge coupled device) et le CMOS (complementary metal oxide semiconductor) sont des technologies de capteurs différentes qui permettent de convertir la lumière en signaux électroniques. Dans un CCD, la charge de chaque pixel est convertie en tension, mise en mémoire tampon et transférée à travers un seul nœud sous forme de signal analogique. Dans un capteur CMOS, la conversion charge-tension est effectuée au niveau du pixel. Historiquement, cette conversion a donné une production moins uniforme.
Les nouvelles avancées de la technologie CMOS au cours des dernières années ont permis de réduire considérablement la non-uniformité dans les environnements à faible luminosité, et dans de nombreuses applications, les capteurs CMOS haut de gamme peuvent surpasser les CCD comparables. En outre, les CMOS consomment moins d'énergie que les CCD, ce qui les rend utiles pour toutes les applications où l'espace est limité. Les capteurs CMOS bas de gamme dont les pixels sont inférieurs à environ 3 µm sont toujours surpassés par les CCD en termes de qualité d'image. Les différences de performance sont mises en évidence dans le Tableau 3.

Figure 1 : Dimensions des capteurs des caméras standard.
| Résolution des caméras par taille de pixel | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| Taille du pixel [µm] | 9,9 | 7,4 | 5,86 | 5,5 | 4,54 | 3,69 | 3,45 | 2,2 | 1,67 |
| Résolution $ \left[ \tfrac{\text{lp}}{\text{mm}} \right] $ | 50,5 | 67,6 | 85,3 | 90,9 | 110,1 | 135,5 | 144,9 | 227,3 | 299,4 |
| Capteur type ½" [MP] | 0,31 | 0,56 | 0,89 | 1,02 | 1,49 | 2,26 | 2,58 | 6,35 | 11,02 |
Tableau 2 : Résolution de la caméra par taille de pixel.
| Capteurs CCD et CMOS | |||||
|---|---|---|---|---|---|
| CCD | CMOS | CCD | CMOS | ||
| Signal de pixel : | Paquet d'électrons | Tension | Uniformité : | Élevée | Moyenne |
| Signal de la puce : | Analogique | Digital | Résolution: | Basse-haute | Basse-haute |
| Facteur de remplissage : | Élevé | Moyen | Vitesse : | Moyenne-haute | Élevée |
| Réactivité : | Moyenne | Moyenne-haute | Consommation d'énergie : | Moyenne-haute | Faible |
| Niveau de bruit : | Faible | De bas à haut | La complexité : | Faible | Moyenne |
| Gamme dynamique : | Élevée | Modérée à élevée | Coût: | Moyenne | Faible |
Tableau 3 : Capteurs CCD et CMOS.
Propriétés spectrales
Cette note correspond à la Section 10.5 du Guide de Ressources en Imagerie.
En fonction des exigences d'une application, la capacité d'une caméra à reproduire les couleurs peut être bénéfique ou non. Une comparaison entre les caméras monochromes, les caméras couleur monopuce et les caméras couleur à trois puces est présentée dans le Tableau 4 et plus de détails sont fournis dans la section suivante.
| Monochrome et couleur | ||
|---|---|---|
| Monochrome | Couleur (monopuce) | Caméras couleur à 3 puces |
| Un seul capteur produit des images en niveaux de gris | Utilise un filtre de couleur RGB Bayer (typique) | Utilise un prisme pour diviser la lumière blanche en trois capteurs différents |
| Résolution supérieure de 10% à celle des caméras couleur comparables à puce unique | Résolution inférieure (plus de pixels nécessaires pour reconnaître la couleur) | Plus coûteux |
| Meilleur rapport signal-bruit ; meilleur contraste | Meilleure résolution des couleurs | |
| Sensibilité accrue en basse lumière | Une sélection plus restreinte d'objectifs | |
| Peut nécessiter des objectifs spécialement conçus | ||
Tableau 4 : Comparaison de caméras monochromes, couleur (monopuce) et couleur à 3 puces.
Caméras monochromes
Les capteurs CCD et CMOS, étant des dispositifs en silicium, sont sensibles à des longueurs d'onde comprises entre 350 et 1050 nm environ, bien que la plage utilisable soit généralement donnée entre 400 et 1000 nm. Cette sensibilité est indiquée par la courbe de réponse spectrale du capteur (Figure 2). Cependant, la plupart des caméras couleur de haute qualité, et certaines caméras monochromes, sont dotées d'un filtre de coupure infrarouge (IR) pour la prise d'images spécifiques dans le spectre visible.

Figure 2 : Réponse spectrale normalisée d'un CCD monochrome typique.
Caméras couleur
Le capteur à semi-conducteurs est basé sur l'effet photoélectrique et, par conséquent, ne peut pas distinguer les couleurs sans autre considération. Il existe deux types de caméras CCD couleur : monopuce et à trois puces. Les caméras CCD couleur monopuce offrent une solution d'imagerie courante et peu coûteuse et utilisent un filtre optique en mosaïque (par exemple, de Bayer) pour rendre les différents pixels sensibles uniquement à certaines longueurs d'onde de la lumière. Une image en couleur est ensuite reconstruite dans le logiciel à l'aide d'un algorithme de « dématriçage » qui interpole les informations de couleur réelle à partir des signaux RVB. Étant donné qu'un plus grand nombre de pixels est nécessaire pour reconnaître la couleur, les caméras couleur monopuce ont par nature une résolution inférieure à celle de leurs homologues monochromes. Les caméras CCD couleur à trois puces (3CCD) sont conçues pour résoudre ce problème de résolution en utilisant un prisme pour diriger chaque section du spectre incident vers une puce différente. Bien que les caméras 3CCD offrent généralement des résolutions extrêmement élevées et une reproduction des couleurs plus précise, elles ont une sensibilité à la lumière plus faible et peuvent être coûteuses.
Taux d'images et vitesse d'obturation
Le taux d'images fait référence au nombre d'images complètes composées en une seconde. Dans les applications à grande vitesse, il est avantageux de choisir un taux d'images plus rapide pour acquérir davantage d'images de l'objet lorsque celui-ci se déplace dans le champ de vision. La vitesse d'obturation correspond à l'inverse du temps d'exposition du capteur. Le temps d'exposition contrôle la quantité de lumière incidente collectée par le capteur. Le blooming (causé par une surexposition) peut être contrôlé en diminuant l'éclairage ou en augmentant la vitesse d'obturation (diminution du temps d'exposition).
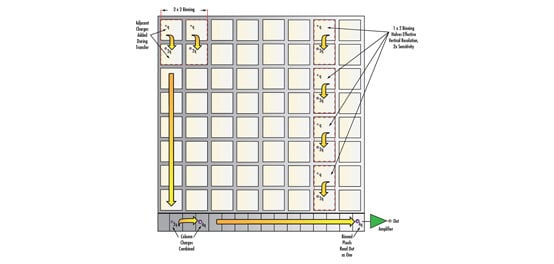
Le taux d'images maximal d'un système dépend de la vitesse de lecture du capteur, du taux de transfert de données de l'interface et du nombre de pixels (quantité de données transférées par image). Souvent, une caméra peut fonctionner à un taux d'images plus élevé en réduisant la résolution par regroupement de pixels ou en limitant la zone d'intérêt. Pour les caméras numériques, les expositions peuvent aller de quelques dizaines de microsecondes à quelques minutes, bien que les expositions les plus longues ne soient généralement pratiques qu'avec les caméras CCD, qui ont des courants d'obscurité et un bruit plus faibles que les CMOS.
Obturateur électronique : Global vs. roulant
Un obturateur global est analogue à un obturateur mécanique, en ce sens que tous les pixels sont exposés et échantillonnés simultanément, la lecture se faisant ensuite de manière séquentielle ; l'acquisition des photons commence et s'arrête au même moment pour tous les pixels. En revanche, un obturateur roulant expose, échantillonne et lit de manière séquentielle ; cela implique que chaque ligne de l'image est échantillonnée à un moment légèrement différent. Intuitivement, les images d'objets en mouvement sont déformées par un obturateur roulant ; cet effet peut être minimisé avec un stroboscope déclenché placé au moment où la période d'intégration des lignes se chevauche. Notez que ce n'est pas un problème à de basses vitesses. La mise en œuvre d'un obturateur global pour le CMOS nécessite une architecture de capteur plus complexe que le modèle standard d'obturateur roulant, et ils ne sont donc pas disponibles sur tous les capteurs CMOS. Une comparaison des obturateurs globaux et roulants est présentée à la Figure 3.



Figure 3 : Comparaison du flou de mouvement. Carte de circuit imprimé stationnaire (A) et images de cartes de circuits imprimés en mouvement avec obturateur global continu (B) et obturateur roulant (C).
Contrairement aux obturateurs globaux et roulants, un obturateur asynchrone fait référence à l'exposition déclenchée des pixels. Autrement dit, la caméra est prête à acquérir une image, mais elle n'active les pixels qu'après avoir reçu un signal de déclenchement externe. Cela s'oppose à un taux d'images constant normal, qui peut être considérée comme un déclenchement interne de l'obturateur.
Pour plus d'informations sur les bases des réglages des caméras numériques et des capteurs, notamment le gain, le gamma, la zone d'intérêt (AOI), etc., lisez Électronique d'Imagerie 101 : Bases de paramétrage d'une caméra numérique pour de meilleurs résultats d'imagerie.
Caméra à balayage de surface ou à balayage linéaire
Cette note correspond à la Section 10.6 du Guide de Ressources en Imagerie.
En fonction des exigences de l'application, le concepteur du système doit choisir entre une caméra matricielle et une caméra linéaire. Dans les caméras matricielles, un objectif d'imagerie focalise l'objet à imager sur la matrice de capteurs, et l'image est échantillonnée par les pixels en une seule fois pour être reconstruite (Figure 4a). Cela est pratique si l'image ne bouge pas rapidement ou si l'objet n'est pas extrêmement grand. Avec les caméras linéaires, les pixels sont disposés de manière linéaire, et lorsque l'objet passe devant la caméra, l'image est prise ligne par ligne et reconstruite par un logiciel (Figure 4b).

Figure 4 : Illustration d'une caméra matricielle (à gauche) et d'une caméra linéaire (à droite).
Les capteurs linéaires sont capables de résolutions beaucoup plus élevées que les dispositifs matriciels, 4000 pixels étant la plus haute résolution horizontale typique des capteurs matriciels, alors qu'il n'est pas rare de trouver plus de 16 000 pixels dans un dispositif linéaire. Cependant, avec les caméras linéaires, l'objet doit être déplacé avec précision par rapport à la caméra pour construire l'image, ce qui rend l'intégration beaucoup plus difficile. Une brève présentation des caméras matricielles et linéaires est fournie dans le Tableau 5.
| Formats des caméras numériques | ||
|---|---|---|
| Matricielle | Linéaire | |
| Rapport 4:3 (H:V) (typique) | Le capteur est linéaire | |
| Applications à haute vitesse jusqu'à quelques centaines de FPS | Applications à haut débit - Débits de ligne jusqu'à 100 kHz | |
| L'objet est immobile ou se déplace lentement | Construit l'image une ligne à la fois | |
| Un plus grand nombre d'applications | L'objet passe en mouvement sous le capteur | |
| Plus facile à mettre en place | Idéale pour capturer des objets larges | |
| Coût inférieur à celui du balayage linéaire | Alignement et synchronisation spéciaux requis | |
| Intégration complexe / Illumination simple mais intense | ||
Tableau 5 : Comparaison des formats de caméras numériques : matricielle et linéaire.
| Configurations standard de montage de la caméra/de l'objectif | ||||
|---|---|---|---|---|
| Monture C | Monture CS | Monture TFL | Monture F | Autres montures courantes |
| Monture filetée | Monture filetée | Monture filetée | Monture Nikon à baïonnette (non filetée) | M12 x 0,5 (montage en S) |
| Diamètre de 1" avec 32 TPI (filets par pouce) | Diamètre de 1" avec 32 TPI (filets par pouce) | M35 x 0,5 mm | Utilisé sur caméras à grand capteur | M42 x 1,0 |
| Distance de la bride arrière 17,5 mm | Distance de la bride arrière 12,5 mm | Distance de la bride arrière 17,5 mm | Distance de la bride arrière 46,5 mm | M72 x 1,0 |
| Interface la plus courante | Compatible avec des objectifs de monture C | Idéale pour les formats de capteurs 4⁄3 à APS-C | Idéale pour les applications à balayage linéaire en format moyen et plein format (35 mm) | |
| Certains objectifs à distance focale courte ne sont pas compatibles | Fréquents sur les objectifs à FL courte / varifocaux | |||












ou consulter les numéros d’autres pays
facile à utiliser
entrer les numéros de stock pour commencer
Copyright 2023 | Edmund Optics, Ltd Unit 1, Opus Avenue, Nether Poppleton, York, YO26 6BL, UK
POLITIQUE DE CONFIDENTIALITÉ | POLITIQUE DE COOKIES | CONDITIONS GÉNÈRALES | CONDITIONS GÉNÈRALES B2C | MENTIONS LÉGALES | ACCESSIBILITÉ
L'entreprise Edmund Optics GmbH en Allemagne agit comme un mandataire d'Edmund Optics BV aux Pays-Bas.
Le titulaire du contrat est Edmund Optics BV aux Pays-Bas.
Ce contenu peut comporter des éléments générés ou modifiés à l'aide de l'intelligence artificielle (IA).
The FUTURE Depends On Optics®