Nos ingénieurs sont là pour vous aider.

|
|
Capturez des images d'objets depuis l'autre côté du mur et derrière les obstacles |
|
|
La lumière rebondit sur une cible cachée, puis est utilisée pour construire un modèle 3D de la cible |
|
|
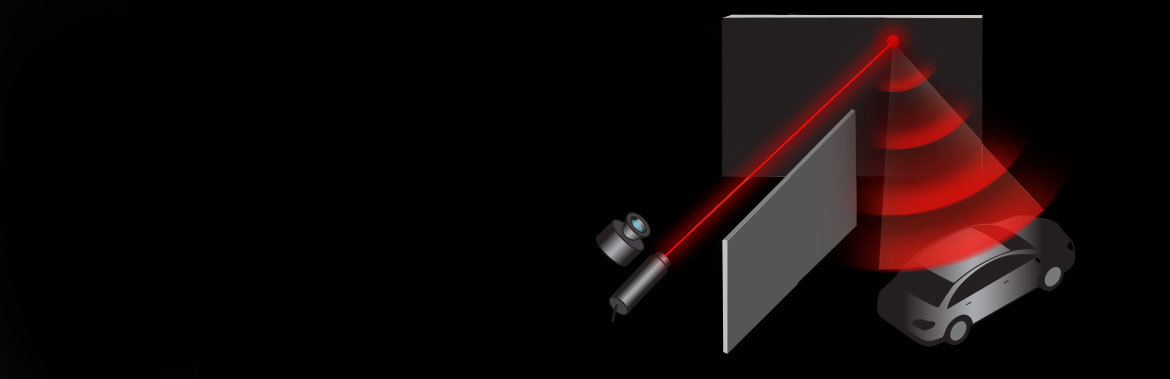
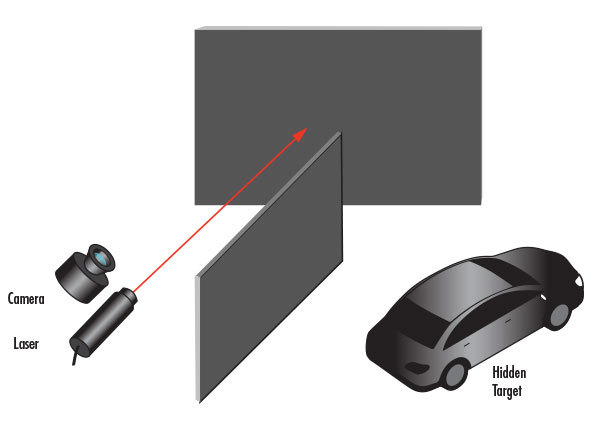
La lumière laser ricoche sur les objets environnants vers une cible cachée |
|
|
Présente de nombreux avantages potentiels pour les véhicules autonomes, la santé publique et l'imagerie médicale |
En général, une ligne de visée directe entre un objet et une caméra ou un détecteur est nécessaire pour chaque application d'imagerie, sauf dans des cas extrêmes tels que la déviation de la lumière due à la lentille gravitationnelle en astronomie. Mais dans la plupart des cas, les applications d'imagerie se limitent à la propagation de la lumière en ligne droite. Cependant, cela commence à changer, car certaines recherches de pointe ouvrent des possibilités d’imager des objets au coin d’une rue ou derrière des obstacles. Grâce à une combinaison de lasers, de caméras sensibles et de méthodes de reconstruction informatique, il est possible de détecter les objets cachés par des obstacles en dispersant la lumière sur des objets environnants.
Le principe d'imagerie hors ligne de visée est similaire à celui du LiDAR (télédétection par laser ou en anglais light detection and ranging), où la distance entre l'objet et un détecteur est donnée par la mesure du temps de vol, c'est-à-dire le délai entre l'émission de l'impulsion et la détection de l'impulsion réfléchie. Cependant, l’imagerie hors de la ligne de visée permet de visualiser des objets dissimulés par des obstacles en ajoutant un autre événement de diffusion à ce processus.1

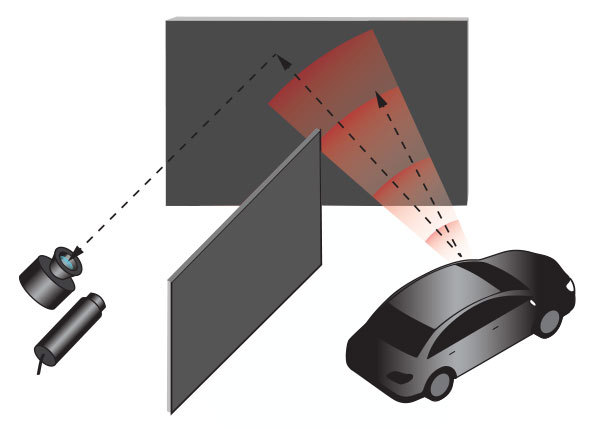
Les caméras très sensibles, comme les caméras à photodiode à avalanche à photon unique, sont nécessaires pour mesurer la propagation d'impulsions lumineuses pico- et femtosecondes en temps réel. Le détecteur reçoit deux échos lumineux différents : un écho initial provenant directement du mur et un écho secondaire provenant de la cible. Ce dernier est utilisé pour l'imagerie hors ligne de visée. Ces informations sur le temps de vol sont ensuite utilisées pour reconstruire une série d'ellipsoïdes qui se chevauchent à un point donné sur la cible cachée, permettant au logiciel de calculer la distance entre la caméra et la cible cachée et de recréer un modèle 3D.
Un objet 3D peut être décomposé en un ensemble de nombreux points individuels qui diffusent la lumière. La somme de tous ces points permet de reconstruire un modèle de l'objet original. Si le détecteur peut distinguer des échos lumineux avec une résolution temporelle de 100 ps, cela correspond à une résolution spatiale de points sur la cible cachée d'environ 1,5 cm.1
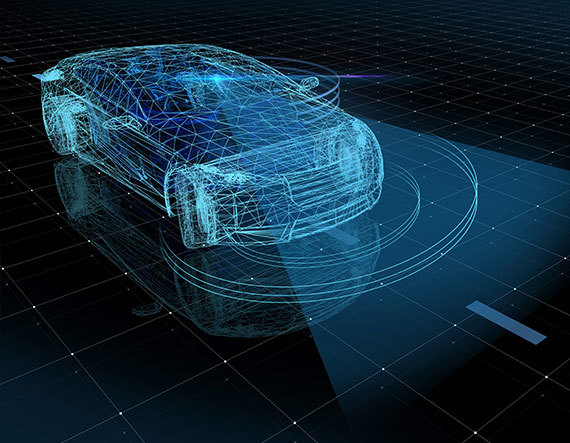
Permettre aux voitures de détecter les véhicules ou les piétons dans les virages avant qu'ils ne soient dans le champ visuel direct de la voiture2

Donner la possibilité aux forces de l'ordre, aux pompiers et aux services médicaux d'urgence de détecter la présence de personnes dans des situations dangereuses à une distance de sécurité2
Étudier les petites structures 3D cachées de la ligne de visée directe du système2
Il est extrêmement difficile d'utiliser cette technologie émergente dans le monde réel et de créer une solution pratique, portable et sans danger/risque pour les yeux de l'observateur. L'un des principaux problèmes de l'imagerie hors ligne de visée est la quantité limitée de lumière qui retourne vers le détecteur, qui doit être capable de capter cette très petite quantité de lumière et de la différencier de toutes les sources de lumière ambiante. Le signal revenant vers le détecteur est le résultat de deux événements de dispersion consécutifs, conduisant à une perte extrêmement élevée. Les échos lumineux peuvent être aussi faibles qu'un seul photon par impulsion laser.1
Cependant, le laboratoire d'imagerie numérique de Stanford a mis au point un système d'imagerie hors ligne de visée qui fonctionne à l'extérieur sous la lumière indirecte du soleil.2 Ils ont réussi à créer une image d'un objet fait de ruban rétroréfléchissant qui était masqué par un mur, ce qui est un présage favorable pour l'avenir de cette technologie.
Le laboratoire d'Aristide Dogariu de l'Université de Floride centrale étudie l'imagerie hors ligne de visée en utilisant la cohérence spatiale de la lumière atteignant un mur au lieu de la lumière laser déflechie par ce mur et par la cible derrière celui-ci.3 Cela pourrait mener à la modélisation de la cible cachée sans nécessiter un éclairage laser ultrarapide, rendant les applications réelles de cette technologie plus portables et faciles à utiliser.
D'autres développements sont encore nécessaires avant que la technologie d'imagerie hors ligne de visée ne devienne disponible dans les systèmes commerciaux pratiques, mais il s'agit d'une solution prometteuse pour la prochaine génération d'applications d'imagerie.
Références1. Faccio, Daniele. “Non-Line-of-Sight Imaging.” Optics and Photonics News, vol. 30, no. 1, Jan. 2019, pp. 36–43.
2. M. O’Toole, D.B. Lindell, G. Wetzstein, “Confocal Non-Line-of-Sight Imaging Based on the Light-Cone Transform”, Nature, 2018.
3. Batarseh, M., et al. “Passive Sensing around the Corner Using Spatial Coherence.” Nature Communications, vol. 9, no. 1, 2018, doi:10.1038/s41467-018-05985-w.
 EO vend-elle des systèmes complets pour l'imagerie hors ligne de visée ?
La lumière laser qui se diffuse d'abord à partir du mur n’atténue-t-elle pas la lumière secondaire qui se diffuse à partir de la cible cachée ?
EO vend-elle des systèmes complets pour l'imagerie hors ligne de visée ?
La lumière laser qui se diffuse d'abord à partir du mur n’atténue-t-elle pas la lumière secondaire qui se diffuse à partir de la cible cachée ?
La diffusion de la lumière directement à partir de la paroi est beaucoup plus forte que la diffusion secondaire de la lumière à partir de l'objet indirect, mais il y a un délai entre elles qui permet aux détecteurs très sensibles ayant une résolution temporelle suffisamment élevée de différencier les deux signaux.2
Une fois que le délai pour la dispersion secondaire de la cible cachée est capturé, comment le logiciel de reconstruction recrée-t-il un modèle 3D de l'objet ?
Le logiciel mémorise d'abord toutes les mesures dans un volume spatio-temporel 3D. Il rééchantillonne ensuite les mesures le long de l'axe de temps, effectue une transformation inverse du résultat vers le domaine fréquentiel et rééchantillonne le résultat le long de l'axe de profondeur pour récupérer l'objet masqué.2
Combien de temps faut-il pour reconstruire un modèle 3D de la cible cachée après l'acquisition des données ?
La procédure d’imagerie hors ligne de visée du laboratoire d'imagerie numérique de Stanford ne prend que 0,5 secondes pour générer le modèle 3D.2


















ou consulter les numéros d’autres pays
facile à utiliser
entrer les numéros de stock pour commencer
Copyright 2023 | Edmund Optics SARL, 76-78 rue d’Alsace, 69100 Villeurbanne, France
L'entreprise Edmund Optics GmbH en Allemagne agit comme un mandataire d'Edmund Optics Ltd au Royaume-Uni. Le titulaire du contrat est Edmund Optics Ltd au Royaume-Uni.