












Sujets autour de la conception télécentrique
Auteurs : Gregory Hollows, Nicholas James
Cette note correspond à la Section 4.4 du Guide de Ressources en Imagerie.
Dans les sections précédentes, les objectifs examinés ont été divisés en deux catégories différentes : les objectifs télécentriques et les objectifs non télécentriques. Cependant, il existe deux types de télécentricité : la télécentricité dans l'espace-objet et la télécentricité dans l'espace-image (qui se réfèrent respectivement à l'emplacement de la pupille d'entrée et de la pupille de sortie). Les pupilles d'un système optique sont des images du diaphragme d'ouverture. En général, les objectifs de vision industrielle ont des diaphragmes d'ouverture intégrés, avec des composants individuels de l'objectif l'entourant de chaque côté. La pupille d'entrée est l'image du diaphragme dans l'espace-objet, et la pupille de sortie est l'image du diaphragme dans l'espace-image. Voir la Figure 1 pour des illustrations des pupilles d'entrée et de sortie pour un objectif non télécentrique.

Figure 1 : Objectif de vision industrielle dont les pupilles d'entrée et de sortie sont situées à l'intérieur de l'objectif, ce qui est typique de la plupart des objectifs à distance focale fixe.
Télécentricité de l'espace-objet
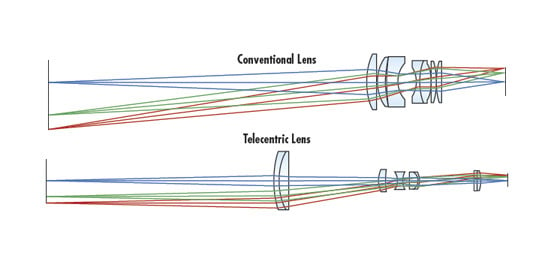
Lorsqu'un objectif de vision industrielle est décrit comme étant simplement télécentrique, il est très probablement télécentrique à l'espace-objet. On dit qu'un objectif est télécentrique dans l'espace-objet lorsque la pupille d'entrée est située à l'infini dans l'espace-image (tout ce qui se trouve derrière l'objectif), comme le montre la Figure 2. Dans une conception optique, la télécentricité de l'espace-objet est réalisée en plaçant le diaphragme du système au point focal du groupe avant. La pupille d'entrée à l'infini explique pourquoi le champ de vision (FOV) est constant et non-angulaire. Puisque le rayon principal, qui définit le FOV d'un système, croise l'axe optique au niveau du diaphragme d'ouverture et se croise au niveau de la pupille d'entrée, le rayon sera parallèle à l'axe optique lorsque la pupille est à l'infini, et le champ de vision angulaire (AFOV) est nul (Figure 3). En revanche, toute pupille d'entrée située à une distance finie de l’objectif donnera lieu à un rayon principal non parallèle, comme le montre la Figure 4 pour un objectif non télécentrique.
Les objectifs qui ne sont télécentriques que par rapport à l'espace-objet peuvent être mis au point car la moitié arrière de l'objectif peut être conçue avec des éléments mobiles, ce qui est avantageux pour les systèmes qui ont besoin de la variabilité de la distance de travail (WD). Ils peuvent également être conçus pour être des objectifs à grossissement variable, car les éléments arrière peuvent être utilisés pour contrôler le grossissement, ou le plan du capteur peut être déplacé pour de petits changements de grossissement. Les objectifs télécentriques uniquement dans l'espace-objet sont plus facilement capables d'atteindre des formats de capteurs d'image plus grands, même dans des facteurs de forme plus compacts, car les rayons dans l'espace-image peuvent diverger ; l'arrière de l'objectif ne doit donc pas dépasser les dimensions du capteur.

Figure 2 : Un objectif qui est télécentrique dans l'espace objet, avec la pupille d'entrée projetée à l'infini du côté de l'image.

Figure 3 : Un objectif télécentrique dans l'espace-objet où les rayons principaux sont tous parallèles à l'axe optique dans l'espace-objet. Notez que le champ de vision ne change pas quel que soit l'endroit où le plan de l'objet est positionné, car les rayons principaux définissant le champ de vision sont tous parallèles à l'axe optique.

Figure 4 : L'emplacement de la pupille d'entrée est l'endroit où le rayon principal de l'espace-objet croise l'axe optique, comme le montre un objectif non télécentrique.
Télécentricité de l'espace-image
Comme la télécentricité de l'espace-objet est définie par la position de la pupille d'entrée dans l'espace-objet, la télécentricité de l'espace-image peut être définie par la pupille de sortie située à l'infini dans l'espace-image. C'est ce que montre la Figure 5. De la même manière que le grossissement d'un objet ne change pas si l'objectif est télécentrique par rapport à l'espace-objet, lorsqu'un objectif est télécentrique par rapport à l'espace-image, le grossissement ne change pas en fonction de l'emplacement du plan du capteur, comme le montre la Figure 6. Cela signifie que la tolérance de placement du capteur pour les caméras n'est pas aussi importante avec les objectifs télécentriques dans l'espace-image, car de petits décalages par rapport à la position optimale ne causeront pas de différences de grossissement entre deux systèmes avec des objectifs identiques.
De plus, les objectifs télécentriques dans l'espace-image ne souffrent pas du roll-off radiométrique cos4θ (voir Éclairement relatif, roll-off et vignettage pour plus de détails) puisque les rayons atterrissent perpendiculairement au capteur sur toute sa surface. Cela est avantageux car il permet à l'image d'avoir un profil d'éclairement relatif plus uniforme en supposant que le vignettage sélectif n'a pas été intégré dans la conception de l'objectif.

Figure 5 : Un objectif qui est télécentrique à l'espace-image avec la pupille de sortie projetée à l'infini de l'espace-image.

Figure 6 : Un objectif télécentrique dans l'espace-image, où les rayons principaux sont tous parallèles à l'axe optique dans l'espace-image. Notez que la hauteur de l'image ne change pas, quel que soit l'endroit où le plan du capteur est positionné, car les principaux rayons définissant la hauteur de l'image sont tous parallèles à l'axe optique.
Double télécentricité
Si la télécentricité dans l'espace-objet permet d'améliorer considérablement la précision des mesures par rapport aux objectifs classiques, une précision encore plus grande peut être obtenue si un objectif est à la fois télécentrique dans l'espace-objet et dans l'espace-image (doublement télécentrique). Les mêmes principes de télécentricité de l'espace-image et de l'espace-objet s'appliquent ; dans un objectif bitélécentrique, les pupilles d'entrée et de sortie sont projetées vers leurs infinis respectifs, comme le montre la Figure 7. Les objectifs bitélécentriques sont le type d'objectif télécentrique le plus précis, car le champ de vision n'est absolument pas affecté par les changements causés par les déplacements de la position de l'objet ou de la position du capteur, et ils ne souffrent d'aucun effet de roll-off cos4θ.
La Figure 8 montre un graphique comparant trois objectifs différents - un objectif à distance focale fixe, un objectif télécentrique dans l'espace-objet uniquement et un objectif bitélécentrique - l'axe des x représentant la variation de la distance focale (en mm) par rapport à la valeur nominale et l'axe des y représentant l'erreur dimensionnelle en pourcentage de la valeur réelle. Comme le montre le graphique, la lentille bitélécentrique est la plus précise du groupe, avec moins de 0,2% d'erreur pour un décalage de 4 mm de la distance de travail. Les objectifs bitélécentriques doivent être utilisés dans les applications exigeant la plus grande exactitude et précision.

Figure 7 : Un objectif bitélécentrique, dont les pupilles d'entrée et de sortie sont projetées respectivement à l'infini de l'espace-image et de l'espace-objet.















ou consulter les numéros d’autres pays
facile à utiliser
entrer les numéros de stock pour commencer
Copyright 2023 | Edmund Optics SARL, 76-78 rue d’Alsace, 69100 Villeurbanne, France
L'entreprise Edmund Optics GmbH en Allemagne agit comme un mandataire d'Edmund Optics Ltd au Royaume-Uni. Le titulaire du contrat est Edmund Optics Ltd au Royaume-Uni.