












Électronique d'Imagerie 101 : Bases de Paramétrage d'une Caméra Numérique pour de Meilleurs Résultats d'Imagerie

Les caméras numériques, comparées à leurs homologues analogiques, offrent une plus grande flexibilité en permettant à l'utilisateur de régler les paramètres de la caméra au moyen d'un logiciel d'acquisition. Dans certains cas, les paramètres des caméras analogiques peuvent être réglés en utilisant des matériels comme des interrupteurs de boîtiers dual in-line (DIL) ou des connexions RS-232. La flexibilité dans la modification des paramètres via le logiciel, améliore grandement la qualité de l'image, sa vitesse, et son contraste. Ce sont des facteurs susceptibles de faire la différence entre l'observation d'un défaut et passer complètement à côté de ce dernier. De nombreuses caméras numériques intègrent des réseaux de portes programmables in situ (FPGA) pour traiter le signal numérique et les fonctions de l'appareil. Les FPGA effectuent les calculs de nombreuses fonctions de caméras numériques, mais aussi ceux de quelques fonctions supplémentaires telles que l'interpolation des couleurs pour des filtres mosaïques et le traitement d'images simples (dans le cas de caméras intelligentes). Le firmware de la caméra inclut un FPGA et une mémoire embarquée. Des mises à jour du firmware sont parfois disponibles pour les caméras, permettant ainsi d'ajouter et d'améliorer ses fonctionnalités. La carte mémoire intégrée dans les caméras numériques permet le stockage des paramètres, des tableaux de conversion, la mise en mémoire tampon de taux de transfert élevés, et le réseautage multi-caméras avec des commutateurs Ethernet. Quelques-uns des paramètres les plus courants de la caméra numérique, sont le gain, le gamma, le fenêtrage, le binning/sous-échantillonnage, la fréquence de pixel, l'offset et le déclenchement. La compréhension de ces paramètres de base permettra d'obtenir de meilleurs résultats dans toute une gamme d'applications.
GAIN
Le gain est un réglage de la caméra numérique qui commande l'amplification du signal depuis le capteur de la caméra. Remarque : il amplifie le signal tout entier, notamment le bruit de fond qui y est associé. La plupart des appareils possèdent un gain automatique, ou autogain, dont l'abréviation est AGC. Certains permettent à l'utilisateur de le désactiver ou de l'activer manuellement.
Le gain peut précéder ou suivre le convertisseur analogique-numérique (ADC). Il est toutefois important de noter que le gain suivant l'ADC n'est pas un gain véritable, mais plutôt un gain numérique. Le gain numérique utilise un tableau de conversion pour associer les valeurs numériques à d'autres valeurs, perdant ainsi certaines informations durant le processus.
Le gain précédant l'ADC peut être utile pour profiter pleinement de la profondeur de bit de la caméra dans des conditions de faible luminosité, même si un éclairage normal est presque toujours plus souhaitable. Le gain peut également être utilisé pour veiller à ce que les prises des capteurs de prises multiples soient bien adaptées. Pour aborder plus en détails les prises de capteurs, consulter la documentation sur Électronique d'Imagerie 101 : Résolution de la Caméra pour une Amélioration de la Performance du Système d'Imagerie. En général, le gain doit être utilisé uniquement après optimisation du réglage d'exposition, puis seulement après que le temps d'exposition soit fixé à son maximum pour un taux d'image donné. Pour un aperçu visuel de l'amélioration que le gain peut apporter à une image, comparer les figures 1a, 1b, 2a et 2b.
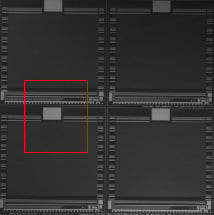
Figure 1a: Image Réelle sans Gain (AGC = 0), Gamma = 1, Fréquence de Pixel 8MHz et Temps d'Exposition 0,2ms
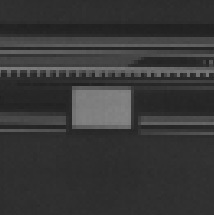
Figure 1b: Plan Rapproché de l'Image avec AGC = 0, Gamma = 1, Fréquence de Pixel 8Hz et Temps d'Exposition 0,2ms
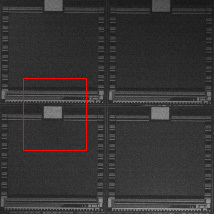
Figure 2a: Image Réele avec Gain Élevé (AGC = 100), Gamma = 1, Fréquence de Pixel 8MHz et Temps d'Exposition 3,4ms
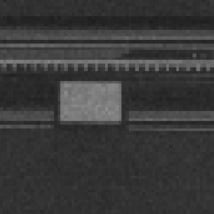
Figure 2b: Plan Rapproché de l'Image avec AGC = 100, Gamma = 1, Fréquence de Pixel 8MHz et Temps d'Exposition 3,4ms
GAMMA
Le gamma est le réglage de la caméra numérique qui commande le niveau de gris reproduit sur l'image. Le gamma d'image d'une unité (Figures 3a - 3b) indique que le capteur de la caméra reproduit précisément le niveau de gris de l'objet (réponse linéaire). Un réglage du gamma beaucoup plus grand qu'une unité se traduit en une image en noir et blanc (Figures 4a - 4b). Il est à noter que le contraste est réduit dans la Figure 4b par rapport à la Figure 3b. Le gamma peut être considéré comme la capacité d'étirer un côté (le noir ou le blanc) de la plage dynamique du pixel. Cette commande est souvent utilisée dans le traitement du signal pour augmenter le rapport signal sur bruit (SNR).
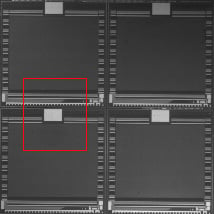
Figure 3a: Image Réelle avec le Gamma Égal à une Unité (Gamma = 1), Fréquence de Pixel 10MHz et Temos d'Exposition 5ms
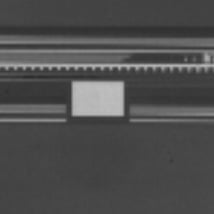
Figure 3b: Plan Rapproché de l'Image avec Gamma = 1, Fréquence de Pixel 10MHz et Temps d'Exposition 5ms
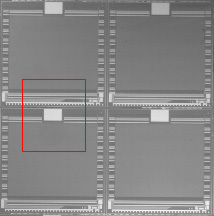
Figure 4a: Image Réelle avec le Gamma Supérieur à une Unité (Gamma = 2), Fréquence de Pixel 10MHz et Temps d'Exposition 5ms
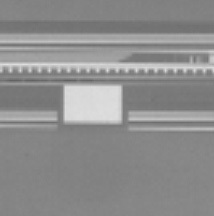
Figure 4b: Plan Rapproché de l'Image avec Gamma = 2, Fréquence de Pixel 10MHz et Temps d'Exposition 5ms
FENÊTRAGE
Le fenêtrage est un paramètre de la caméra numérique, qui s'effectue au moyen d'un logiciel ou qui est embarqué, et permet à un sous-ensemble du groupe de capteurs de la caméra, d'être lu pour chaque champ. Cette fonction est utile pour réduire le champ de vision (FOV) ou la résolution au taux le plus faible requis, en vue de diminuer la quantité de données transférées, augmentant ainsi la vitesse de défilement possible. La pleine résolution, en termes de fréquence de Nyquist ou de fréquence d'échantillonnage spatial, peut être utilisée pour ce sous-ensemble du champ global. Un champ carré de 494 x 494 peut par exemple, contenir toutes les informations utiles pour un cadre donné et peut être utilisé de manière à ne pas gaspiller la bande passante. Pour de plus amples informations sur la fréquence de Nyquist, consultez la documentation sur l'Électronique d'Imagerie 101 : Types de Caméra et d'Interfaces pour des Applications de Vision Industrielle.
BINNING/SOUS-ÉCHANTILLONNAGE
Avec le binning ou le sous-échantillonnage, l'ensemble du champ de vision sera utilisé, mais pas la résolution complète de la caméra. Dans ce cas, les valeurs de gris des pixels adjacents peuvent être moyennées ensemble pour former de plus grands pixels effectifs, ou seulement chaque autre lecture de pixel. Le binning ou le sous-échantillonnage augmente la vitesse en diminuant la quantité des données transférées.
Le binning est spécifique aux capteurs CCD, où les charges des pixels adjacents sont physiquement combinées, de manière à augmenter l'exposition et la sensibilité effectives. Le sous-échantillonnage se réfère généralement à des capteurs CMOS pour lesquels le binning est strictement impossible. Le sous-échantillonnage n'offre aucune augmentation de l'exposition ou de la sensibilité. Le sous-échantillonnage peut par contre être utilisé avec des capteurs CCD au lieu du binning lorsqu'une basse résolution et des taux de transfert élevés sont désirés, et ne nécessitent aucune exposition initiale. Pour plus d'informations détaillées sur les capteurs, consulter notre documentation sur l'Électronique d'Imagerie 101 : Compréhension des Capteurs de Caméra pour les Applications de Vision Industrielle.
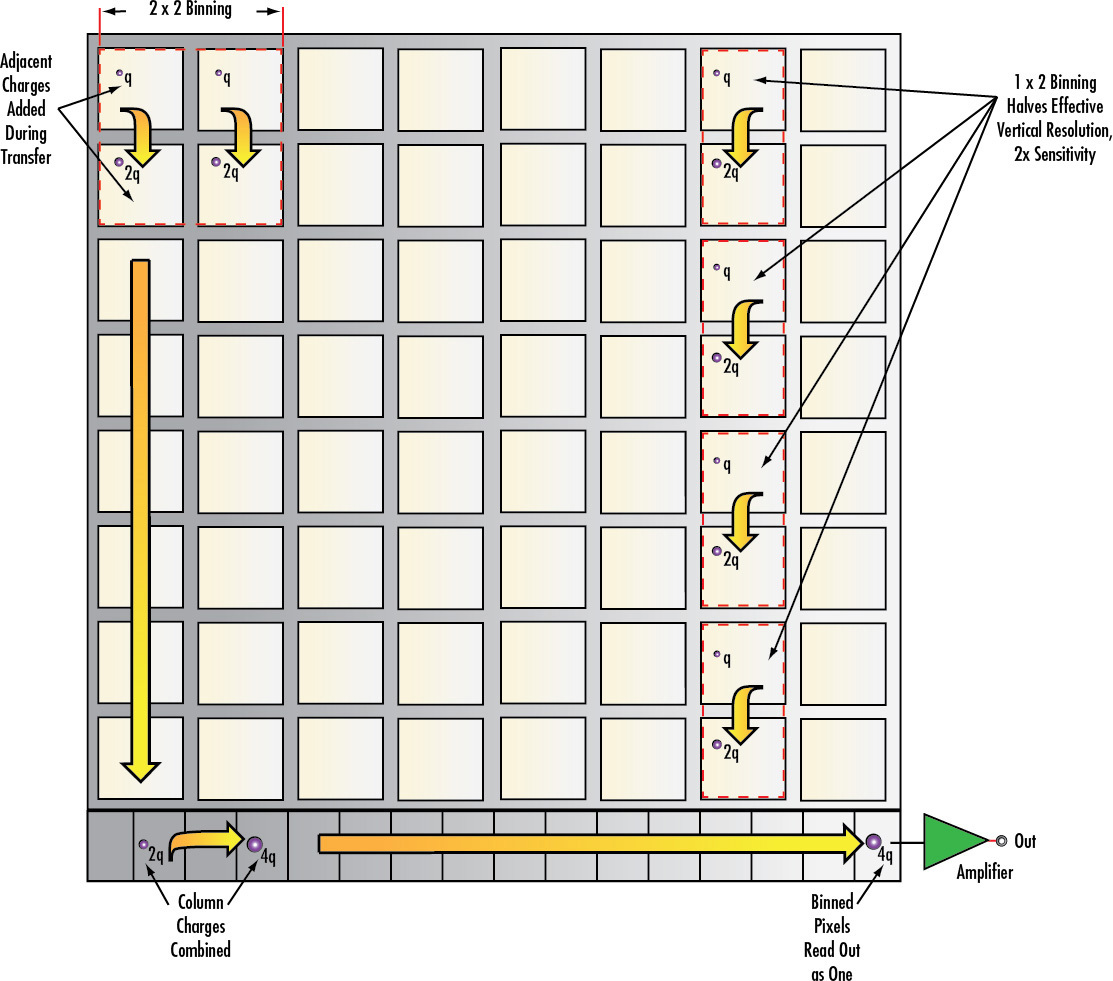
Figure 5: Illustration du Binning ou du Sous-échantillonnage des Pixels de Caméra
FRÉQUENCE DE PIXEL
Dans un capteur de caméra CCD, la fréquence de pixel décrit la vitesse des signaux complémentaires qui sont utilisés pour déplacer les paquets de charge à travers les registres à décalage, vers les amplificateurs de lecture. Cette fonction détermine le temps requis pour lire l'ensemble du capteur, mais elle est également limitée par des problèmes de bruit et de retombées qui se produisent lorsque les paquets sont transférés trop rapidement. Par exemple, deux caméras ayant des capteurs identiques, peuvent utiliser différentes fréquences d'horloge de pixels, ce qui produit des performances différentes en capacité de saturation (plage linéaire) et en vitesse de défilement. Ce paramètre n'est pas facilement réglable par l'utilisateur, car il est généralement fixé à une valeur optimale spécifique au capteur et aux capacités FPGA. L'overclocking d'un capteur effectué en augmentant la fréquence de pixel, peut aussi entraîner des problèmes thermiques.
OFFSET
L'offset se réfère à la composante continue d'un signal vidéo ou d'image, et définit efficacement le niveau de noir de l'image. Le niveau de noir est le niveau de pixels (en électrons ou en volts) qui correspond à une valeur de pixel de zéro. Il est souvent utilisé avec un histogramme pour assurer la pleine utilisation de la profondeur de bits de la caméra, en augmentant le signal sur bruit de manière effective. Le fait de pousser des pixels non-noirs à zéro éclaircit l'image, même si elle n'améliore en rien les données. En augmentant le niveau de noir, l'offset est utilisé comme une simple technique de traitement de l'image de vision industrielle, permettant d'éclaircir et de créer efficacement un seuil, en réglant tous les pixels en dessous d'une certaine valeur à zéro pour mettre en évidence les détails.
DÉCLENCHEMENT
Selon l'application requise, il peut être utile d'exposer ou d'activer des pixels seulement lorsqu'un événement intéressant se produit. Dans ce cas, l'utilisateur peut utiliser le paramètre de déclenchement de la caméra numérique pour permettre à la caméra d'acquérir des images seulement quand une commande est donnée. Cette fonction peut être utilisée pour synchroniser la capture d'image avec une source de lumière stroboscopique, ou de prendre une image quand un objet passe un certain point ou active un interrupteur de proximité. Cette dernière fonction étant utile lorsque les images sont stockées pour être examinées à une date ultérieure. Le déclenchement peut également être utilisé dans des cas où un utilisateur a besoin de prendre toute une séquence d'images d'une manière non-périodique, à une vitesse de défilement constante par exemple.
Le déclenchement peut s'effectuer par le biais de matériels hardware ou de logiciels. Les déclenchements par matériels hardware sont parfaits dans les applications de haute précision, où la latence intrinsèque à un déclenchement par logiciel, est inacceptable (qui peut être de plusieurs millisecondes). Les déclencheurs par logiciels sont souvent plus faciles à mettre en œuvre parce qu'ils prennent la forme d'une commande informatique transmise par une voie de communication habituelle. Un exemple de déclencheur par logiciel est la fonction d'alignement dans le logiciel de visualisation d'images.
Bien qu'il existe nombre de paramètres supplémentaires dans une caméra numérique, il est important de comprendre les bases du gain, du gamma, du fenêtrage, du binning/sous-échantillonnage, de la fréquence de pixel, de l'offset et du déclenchement. Ces fonctions posent les jalons des techniques avancées dans le traitement d'image qui exigent une connaissance des paramètres élémentaires mentionnés plus haut. Pour en savoir plus sur les systèmes électroniques d'imagerie, veuillez consulter notre série complémentaire 101 sur l'électronique d'imagerie, se rapportant à des capteurs de caméra, la résolution de la caméra, et les types de caméra..



























































ou consulter les numéros d’autres pays
facile à utiliser
entrer les numéros de stock pour commencer
Copyright 2023 | Edmund Optics SARL, 76-78 rue d’Alsace, 69100 Villeurbanne, France
L'entreprise Edmund Optics GmbH en Allemagne agit comme un mandataire d'Edmund Optics Ltd au Royaume-Uni. Le titulaire du contrat est Edmund Optics Ltd au Royaume-Uni.